




Сегодня мы еще поговорим о наших любимых 3д принтерах. Для того чтобы создавать объекты в объемном пространстве нам нужно перемещать печатающую головку либо платформу по трем осям XYZ. Принцип работы в плане перемещения называется кинематикой 3д принтера. На сегодняшний день существует несколько популярных кинематик используемых повсеместно, а какие-то кинематики слишком сложны в исполнении, либо имеют больше минусов чем плюсов поэтому и не нашли широкой популярности среди пользователей и производителей 3D принтеров.
Ниже мы рассмотрим три типа 3D принтеров: картезианский, дельта, роботизированный манипулятор.
Сегодня самыми распространенными являются приборы с картезианской кинематикой. Основанная на декартовой системе координат, эта технология работает на основе трех осей – X, Y, Z. По одной или нескольким из них осуществляется движение механических частей прибора, т.е., заданные по осям координаты реализуют схему перемещения и положения печатающей головки относительно платформы.
Количество вариантов перемещения печатной головы и платформы ограничено:
- Платформа передвигается по одной из горизонтальных осей — X или Y, экструдер движется по другой и в высоту.
- Платформа перемещается по высоте, по оси Z, а экструдер передвигается по двум плоскостям, вперед-назад и влево-вправо.
- Платформа движется по одной из осей и в высоту, экструдер — по другой оси.
- Платформа неподвижна, экструдер передвигается по всем трем осям.
- Платформа движется по осям XY, экструдер перемещается по высоте.
Первый и второй вид перемещения являются самыми распространенными.
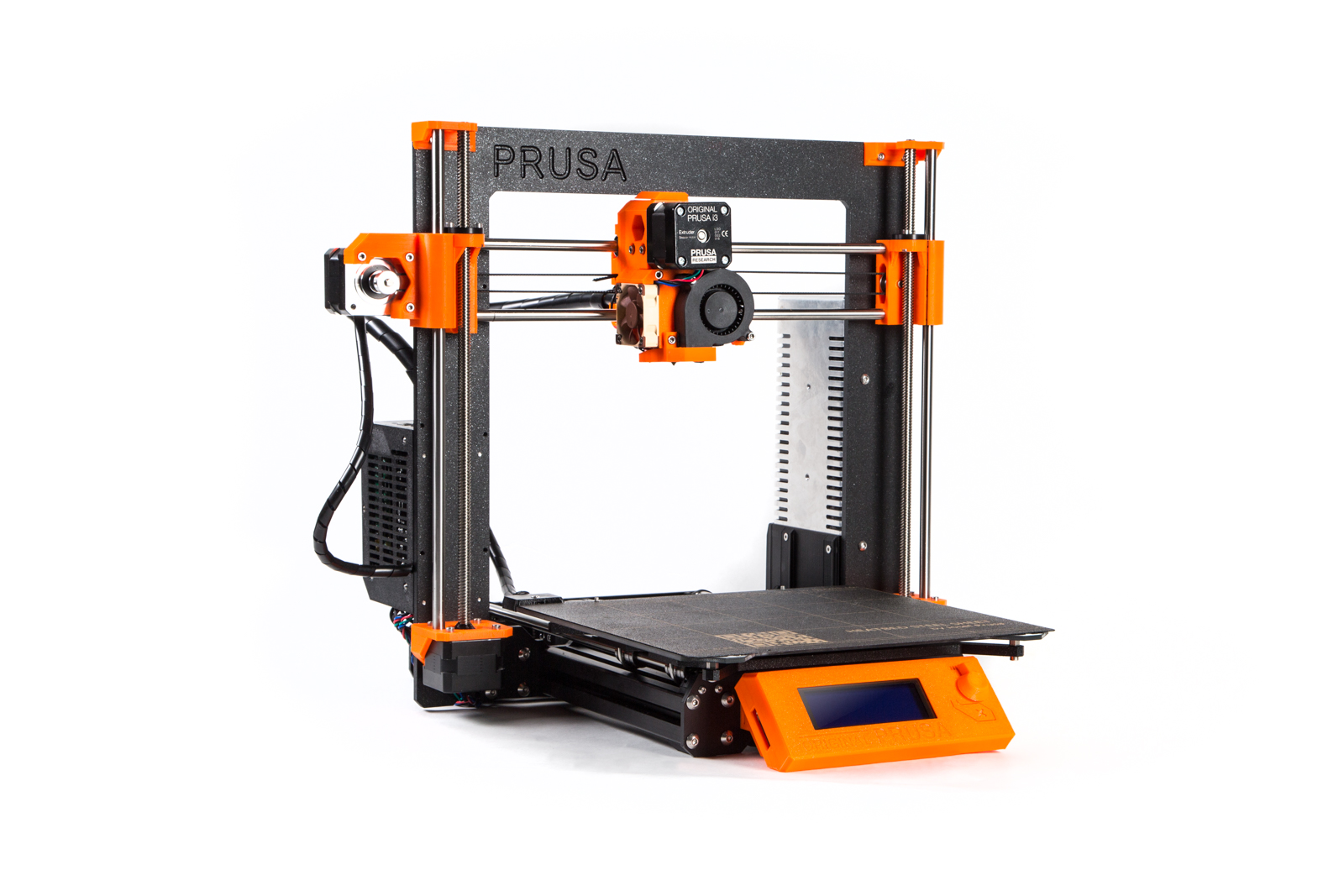
К первому виду относится Prusa i3 кинематика. Где печатная платформа движется но оси Y, а печатная головка перемещается как по оси X, так и вверх-вниз по оси Z. Данная кинематика максимально проста. Она очень хорошо подходит для любительской печати, больше половины бюджетных китайских принтеров построены именно на этой кинематике. Собрать принтер можно практически любых размеров, он отлично модернизируется. Сегодня хотите печатать пластиком, завтра шоколадом, а послезавтра глиной? Эта кинематика для вас. Часто принтеры с данной кинематикой для еще большего снижения цены поставляются в разобранном виде. Из минусов можно отнести то, что принтеры такого типа достаточно грамосткие и занимают много места на столе. Также к минусам можно отнести низкую скорость печати.
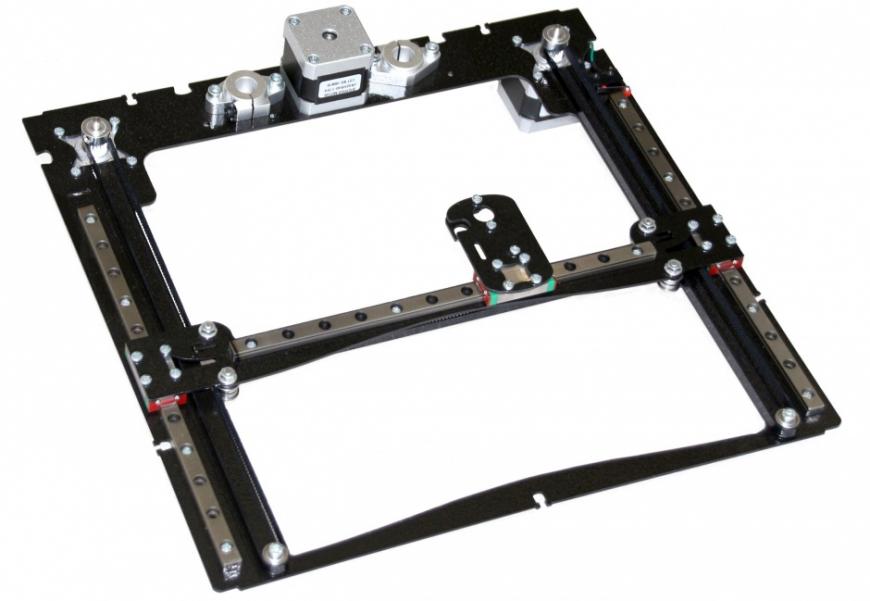
Ко второму виду относятся такие кинематики как CoreXY, H-bot, которые так же часто путают. Главным отличием этих двух кинематик является то что на coreXY установлено 2 подающих ремня, в то время как на H-bot установлен один длинный ремень. Из общих черт, из-за которых эти кинематики часто путают является то что на принтерах такого типа стол движется по вертикали (то-есть оси Z), а оси X Y приводятся в движение с помощью двух закрепленных на раме принтера двигателей. Так же интересной особенностью является то, что за перемещение по одной оси отвечают сразу 2 двигателя, в то время как для перемещения по диагонали достаточно вращения всего одного двигателя. Данная кинематика получила широкое распространение не только в домашней, но и профессиональной 3д печати. Ценовой сегмент такох аппаратов обычно выше среднего, так как для них используется прочный металлический корпус (либо композитный), рельсовые направляющие и комплектующие высокого качества, которые помогают раскрыть потенциал кинематики на полную. Ведь данная кинематика позволяет не только печатать детали с очень высоким качеством и детализацией, но и делать это на высокой скорости.
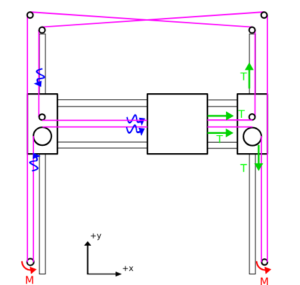
Схематичное толкование кинематики CoreXY и H-bot
Сама по себе кинематика имеет огромное количество плюсов, которые перекрывают все недостатки, но они все же есть. Кинематику H-bot практически невозможно реализовать на стальных валах, ведь при передачи крутящего момента с двигателей на каретку, на крепление оси создается высокое угловое давление, из-за чего ремень стремится скрутить ось. С кинематикой H-bot вам нужен не только качественный длинный ремень, но и следить за его натяжением, ведь если ремень будет плохо натянут, в каретке образуется люфт. К минусу можно так же отнести высокую стоимость приборов простроенных на данной кинематике, но и печатают они тоже достойно. Кинематика coreXY так же не лишена минусов. Главный критерий тут тоже ремни, которые тянутся их нужно натягивать время от времени. Так же шкивы по которым ходят ремни должны быть строго перпендикулярны направлению движения ремня. Так же частой проблемой является то что ремни трутся о какие либо части и во время работы быстро изнашиваются.
Вот отличное видео, дающее представление о различии этих двух кинематик.
Дельта-принтеры

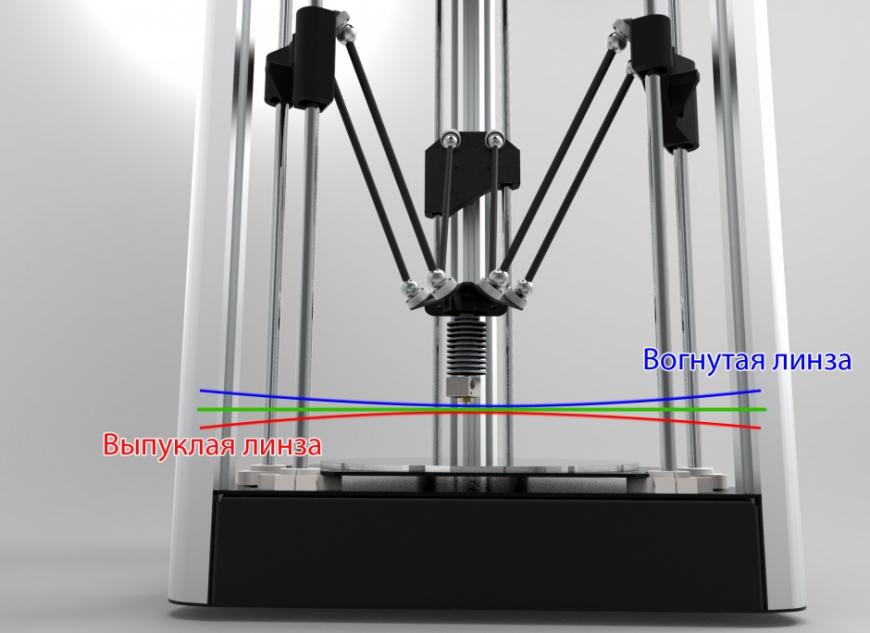
«Дельты» сильно отличаются от своих конкурентов. Стол в таких принтерах неподвижный, а для перемещения печатающей головки принтер использует сразу 3 оси. В дельте нет такого понятия как оси XYZ, Ведь чтобы переместить каретку ровно вбок принтеру нужно опустить одну ось, и немного приподнять 2 другие оси.
К данному типу можно отнести не только классические дельта принтеры, но и Дельта-роботы. В них момент передается не на прямую от двигателей к кареткам через ремень, а через шестерню на плечо. Данный вид кинематики является очень интересным и перспективным, но пока не нашел большого развития в 3д печати, в отличии от роботов сортировщиков.
Дельта имеет несколько приемуществ перед другими принтерами, а именно:
Компактность. Принтеры такого типа не занимают много места, и обычно вытянуты в высоту.
Скорость. Скорость это главный плюс данной кинематики, некоторые экземпляры развивают скорость печати до 300-400 мм/с.
Креативность. Данная кинематика просто завораживает, смотреть как такой аппарат печатает можно бесконечно.
Отличным примером классического Дельта 3D принтера является Anycibic Kossel. Это одна из самых популярных моделей.
Но как и любая существующая кинематика не может быть идеальной и тоже имеет свои минусы.
Калибровка. Данный вид принтеров солжно калибровать из-за образующейся линзы на печатной поверхности. Из-за этого некоторые считают данный вид кинематики совершенно не подходящим для 3д печати.
Точность. Скорость печати это конечно хорошо, но точность таких принтеров часто хромает. Возникает это из-за большого количества мелких передвижений всех осей, из-за чего погрешность имеет накопительный характер.
Требования. Кинематика требовательна к вычислительной мощности, из-за чего 8 битные системы часто не стравляются с работой и образуют артефакты. На этих принтерах часто можно увидеть 32 битные платы, которые могут обработать на много больше информации за единицу времени. Также дельта принтеры требовательны и к раме. Тут приветствуется жесткость и надежность, чтобы избежать любых искривлений, люфтов и отклонений.
Экструдер. Ограничение по весу не дает использовать Direct экструдер. Тяги часто крепятся к каретке через магнитное соединение, а увеличение веса не только снизит качество и скорость печати, но и может превысить максимальный вес, которые могут выдержать магнитные соединения.
3D-принтеры с роботизированными манипуляторами
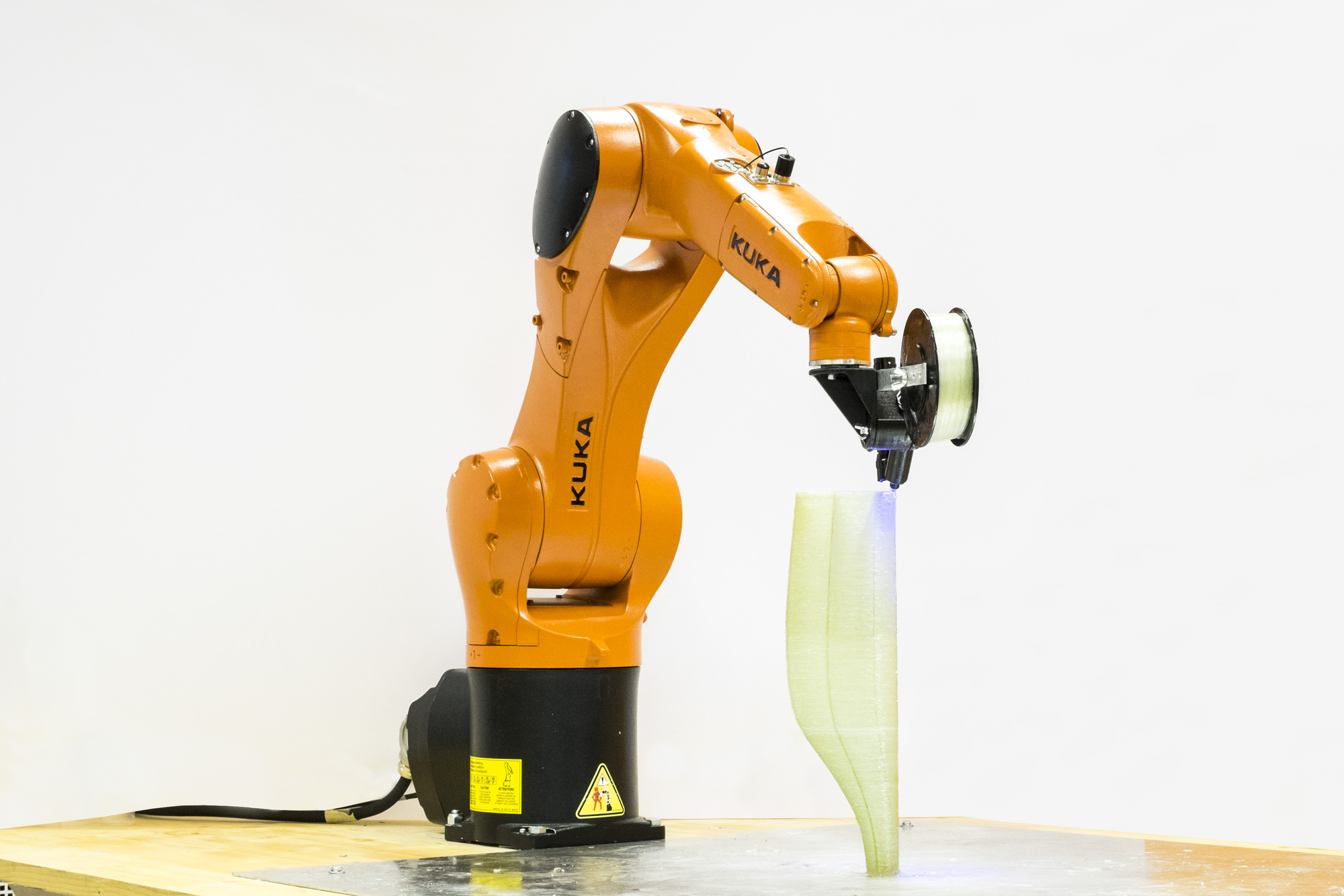
Представляют собой конструкцию с механическим программируемым манипулятором-захватом заменяемым экструдером. Если речь о крупных промышленных экземплярах (а бывают и более компактные), то, помимо функций манипулятора и 3D-принтера, такой робот может производить сварочные работы, фрезерование, покраску и другие операции.
Экструдер может перемещаться не только послойно, как в настольных принтерах, но и по сложным траекториям в трех измерениях, и под разными углами, что облегчает процесс создания сложных конструкций. Несомненный плюс также то, что обычно это универсальные конструкции, при замене экструдера на другие блоки выполняющие множество задач.
По точности печати манипуляторы не составят конкуренции картезианским 3D-принтерам, но, благодаря своей универсальности и крупным размерам, промышленные роботы активно используются в 3D-печати в промышленных условиях, где почти незаменимы.
Миниатюрные настольные роботы хороши в первую очередь как наглядное пособие, а также объект хобби или инструмент для него.
Какой вид кинематики вам подходит должен решать каждый. Ведь каждая из кинематик имеет как плюсы так и минусы. Только определившись с целями и своими потребностями можно оценить предложенные на рынке варианты и сделать свой выбор.